Tutorial¶
介绍¶
physical blocks 2.0,新的更新我们都将在这个版本是进行,physical blocks 1.0在未来将弃用。
使用 physical blocks,可以在一张桌子上对实物进行编程。
Windows 和 Mac 用户开箱可用。 Linux需要安装依赖(参考文末)
提醒
CodeLab Adapter版本 >= 3.7.3
参考:
积木介绍¶
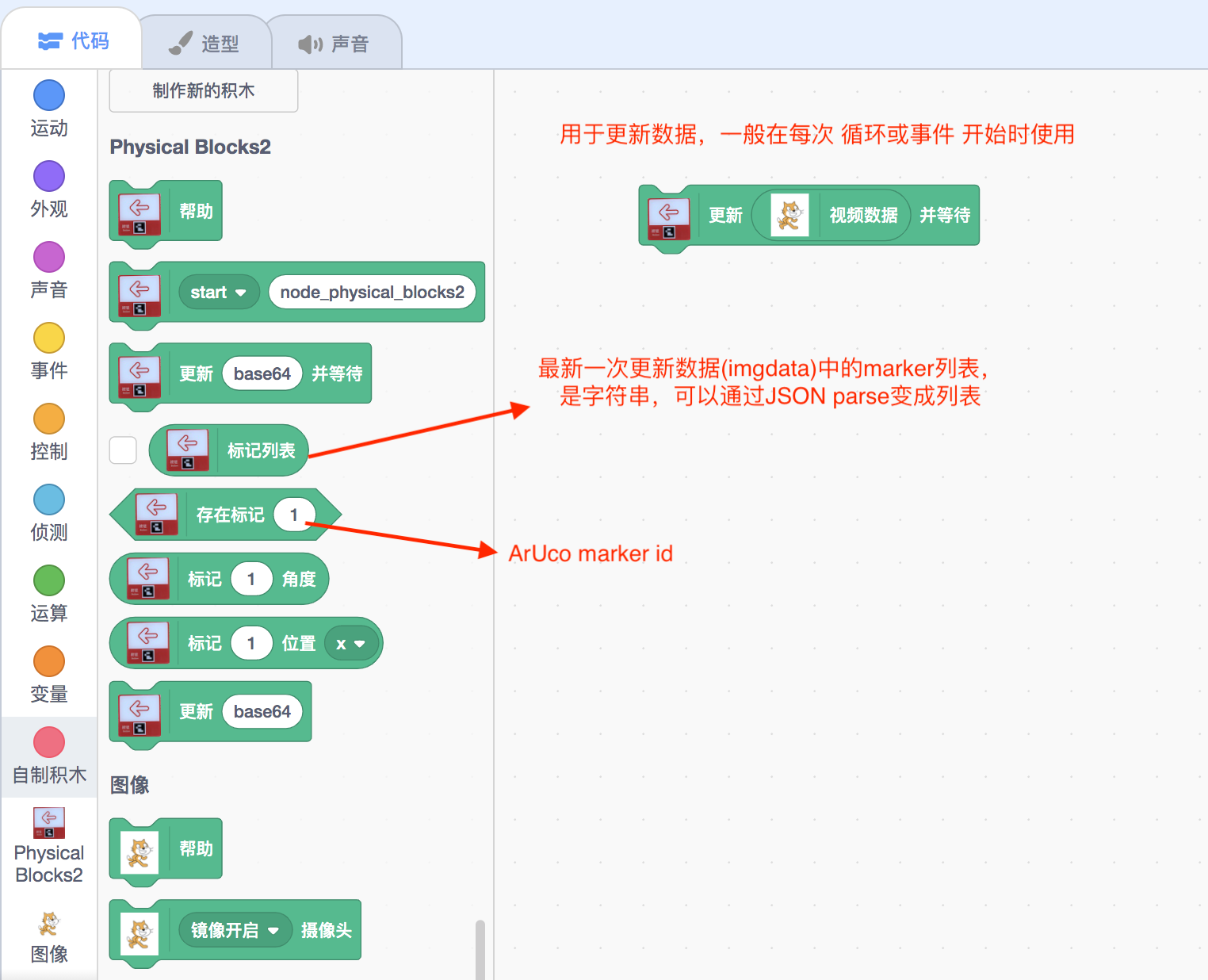
可以从 arucogen 查询 ArUco marker id
Demo¶
入门案例¶
分享两个入门案例:
- physical-blocks2-angle-demo : 获取 marker 旋转角
- physical-blocks2-spell-demo : 获取 marker id 列表(从左到右,从上到下)
更多案例¶
FAQ¶
刷新率/FPS¶
在 MacOS(2.3 GHz Intel Core i5)下,大约达到10帧的刷新率
目前尚未发布的 Pro 版本大约是 20 帧的刷新率
可使用以下技巧观察刷新率:
与1.0版本的区别?¶
标记列表默认是字符串(序列化之后),可以随意与scrath积木组合(诸如xx包含xx积木),避免因为操作list引起的崩溃(诸如将list保存为变量)。
在2.0中,直到主动使用JSON parse积木解析后,它才称为列表。相关操作参考:json积木,也可参考前边的例子: physical-blocks2-spell-demo
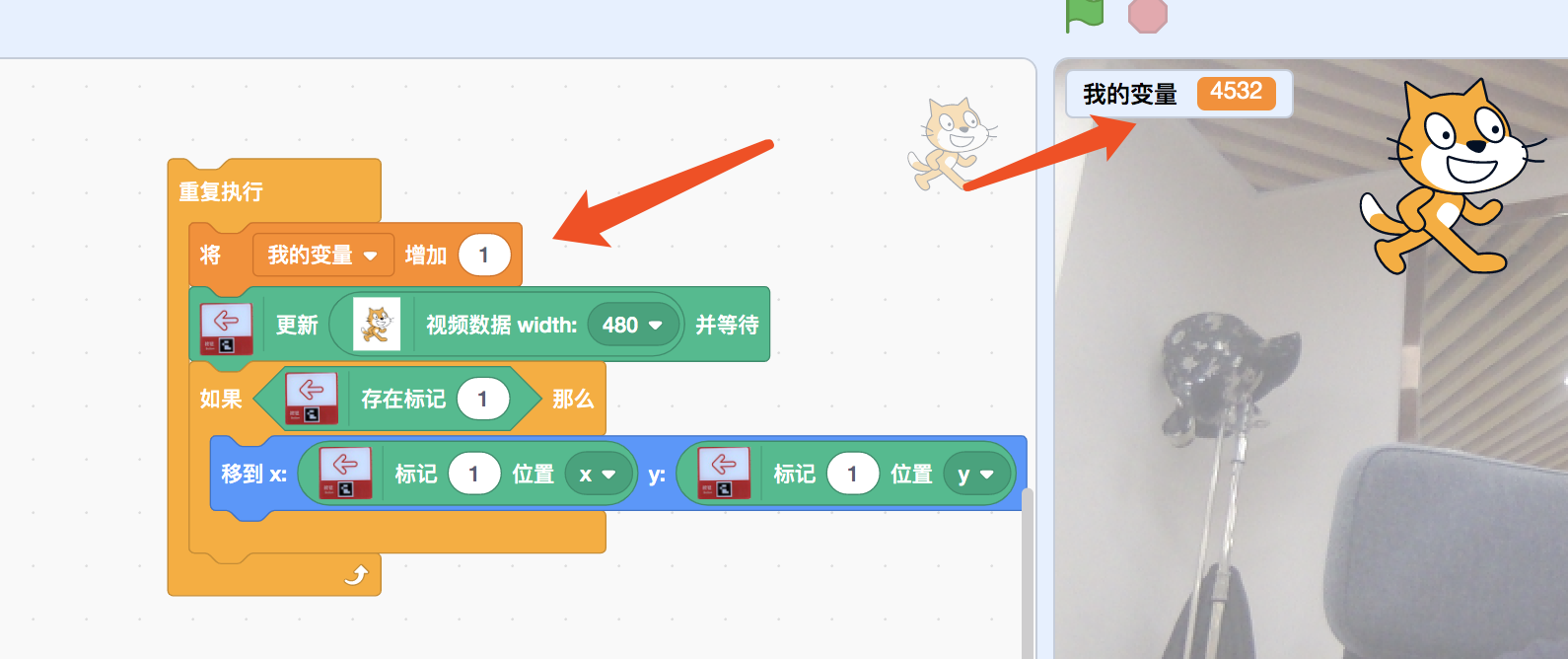
此外2.0 只使用一个积木更新数据,提高标签存在的稳定性(也提高速度),其中一种典型的编程模式是: 在一次更新数据之后的积木都对应更新瞬间的视野状态。而不像1.0,每个积木都有各自瞬间的视野。
如何打印 Marker¶
我们提供了一份30张的版本:

你可以从 arucogen 里打印(建议从编号1开始)
更多细节参考CodeLab DynamicTable: 一个可实施的技术方案
默认的Marker支持250种不同类型(marker id)¶
默认是4X4_250(最多250种)的marker, 你可以选择:
4x4_50(最多50种)4x4_250(最多250种)4x4_100(最多100种)4x4_1000(最多1000种)
选择之后请修改(推荐使用JupyterLab)插件里对应的代码(104行):
# aruco_dict = cv2.aruco.Dictionary_get(cv2.aruco.DICT_4X4_250)
aruco_dict = cv2.aruco.Dictionary_get(cv2.aruco.DICT_4X4_1000)
关于不同的marker数量决定了字典的大小,越小的数字,鲁棒性越好。
Linux 用户¶
Linux 用户需要手动安装 opencv-contrib-python(有系统依赖)。
树莓派用户¶
安装依赖系统
sudo apt-get install libjpeg-dev libtiff5-dev libjasper-dev libpng12-dev
sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev
sudo apt-get install libxvidcore-dev libx264-dev
sudo apt install libatlas-base-dev
sudo apt-get install qt4-dev-tools
sudo apt-get install libhdf5-dev libhdf5-serial-dev libhdf5-103
之后安装opencv-contrib-python
pip3 install opencv-contrib-python==3.4.6.27